IRQ – Interrupt Request Pins
In this tutorial, you’ll get to know what are IRQ pins? Why we need them? How to use these pins. We’ll also develop the necessary firmware in order to create IRQ handlers for our PIC Microcontroller chip.
In this tutorial, you’ll get to know what are IRQ pins? Why we need them? How to use these pins. We’ll also develop the necessary firmware in order to create IRQ handlers for our PIC Microcontroller chip.
in this tutorial, you’ll learn how ultrasonic sensors work, what are their applications and how to use this sort of sensors with microcontrollers. We’ll also develop the necessary firmware to interface the ultrasonic sensor and display the readings on a breadboard.
In this tutorial, we’ll discuss how to generate accurate time intervals with timer modules using the timer preloading technique. You’ll learn both how to measure and eliminate error in timer output intervals
Is this tutorial, we’ll discuss why to use timers instead of delay? What are the drawbacks of using time delays within your main loop? These questions will be addressed and answered in this short tutorial,
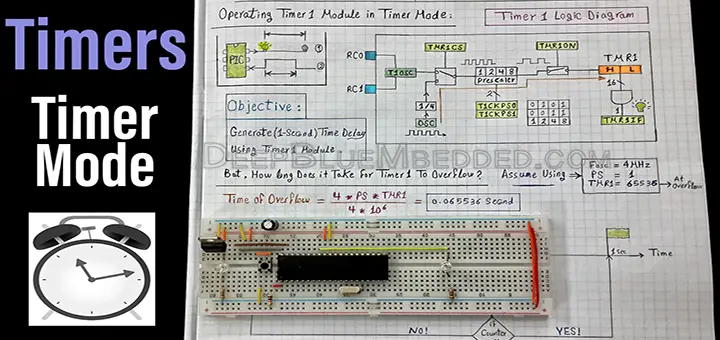
In this tutorial, you’ll learn what are timer modules? How do they work? What are their modes of operation, and applications? You’ll also learn how to operate the timer modules within the Microchip PIC microcontrollers.
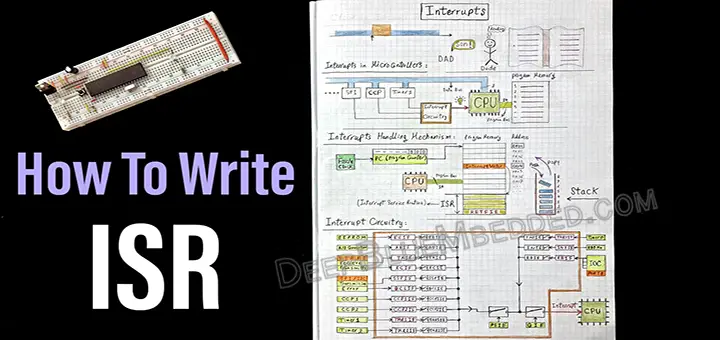
In this tutorial, we’ll discuss a few guidelines to follow while writing ISR handlers. Which you can use as a guide for the upcoming tutorials. Let’s see how to properly write ISR handlers!
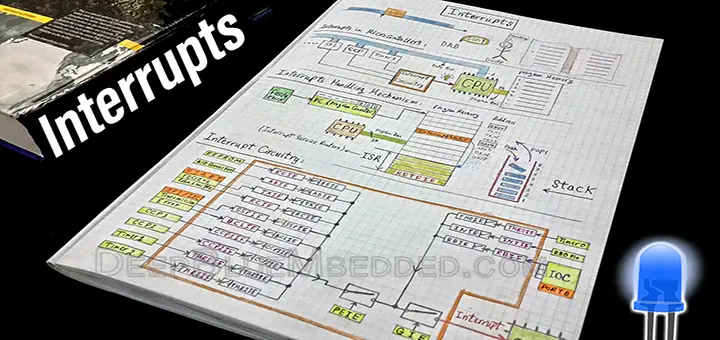
In this tutorial, you’ll learn what are interrupts in microcontrollers. How interrupt handling mechanism actually works? And how to respond (service) interrupt signals? You’ll learn all the fundamental mechanics of these processes. You’ll also understand the interrupt logic circuitry within our PIC16F microcontroller platform.
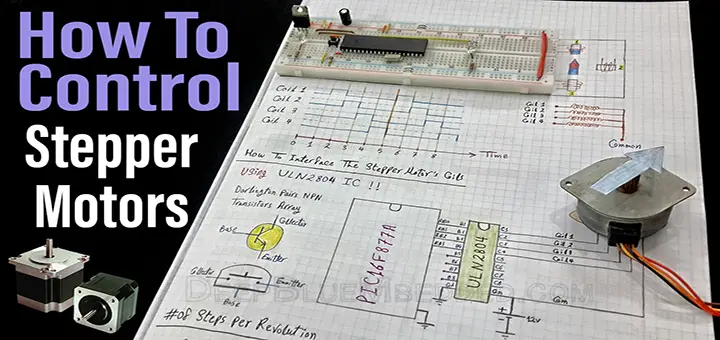
In this tutorial, you’ll learn how stepper motors work and how to control/drive a stepper motor with PIC microcontrollers. We’ll discuss the theoretical principles of operation then we’ll develop the required firmware and circuitry to implement and test everything in practice.